LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling
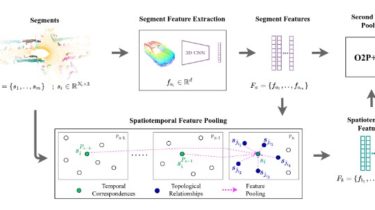
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling. More information: https://research.csiro.au/robotics/locus-pr/ Paper Pre-print: https://arxiv.org/abs/2011.14497 Method overview. Locus is a global descriptor for large-scale place recognition using sequential 3D LiDAR point clouds. It encodes topological relationships and temporal consistency of scene components to obtain a discriminative and view-point invariant scene representation. Usage Set up environment This project has been tested on Ubuntu 18.04 (with Open3D 0.11, tensorflow 1.8.0, pcl […]
Read more