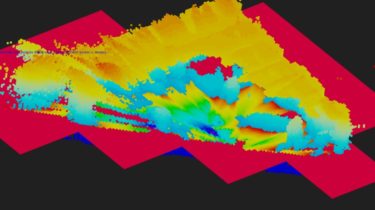
A 3D Dense mapping backend library of SLAM based on taichi-Lang designed for the aerial swarm
TaichiSLAM This project is a 3D Dense mapping backend library of SLAM based Taichi-Lang, designed for the aerial swarm. Taichi is an efficient domain-specific language (DSL) designed for computer graphics (CG), which can be adopted for high-performance computing on mobile devices. Thanks to the connection between CG and robotics, we can adopt this powerful tool to accelerate the development of robotics algorithms. In this project, I am trying to take advantages of Taichi, including parallel optimization, sparse computing, advanced data […]
Read more