Pop-Out Motion: 3D-Aware Image Deformation via Learning the Shape Laplacian (CVPR 2022)
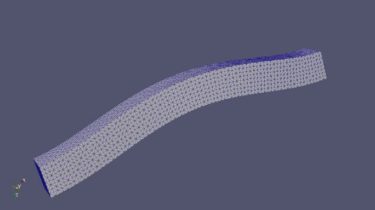
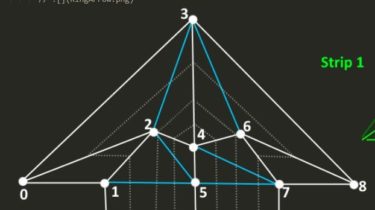
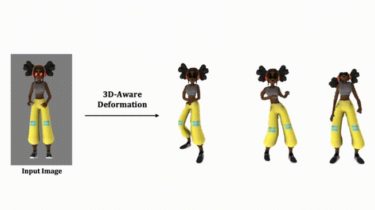
Pop-Out Motion: 3D-Aware Image Deformation via Learning the Shape Laplacian (CVPR 2022) Jihyun Lee*, Minhyuk Sung*, Hyunjin Kim, Tae-Kyun (T-K) Kim (*: equal contributions) [Paper] [Video] We present a framework that can deform an object in a 2D image as it exists in 3D space. While our method leverages 2D-to-3D reconstruction, we argue that reconstruction is not sufficient for realistic deformations due to the vulnerability to topological errors. Thus, we propose to take a supervised learning-based approach to predict the […]
Read more