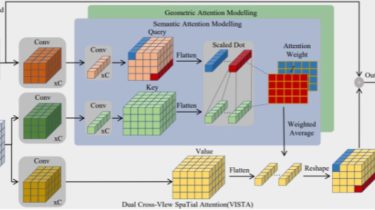
VISTA: Boosting 3D Object Detection via Dual Cross-VIew SpaTial Attention

VISTA: Boosting 3D Object Detection via Dual Cross-VIew SpaTial Attention
Shengheng Deng, Zhihao Liang, Lin Sun and Kui Jia*
(*) Corresponding author
Introduction
Detecting objects from LiDAR point clouds is of tremendous significance in autonomous driving. In spite of good progress, accurate and reliable 3D detection is yet to be achieved due to the sparsity and irregularity of LiDAR point clouds. Among existing strategies, multi-view methods have shown great promise by leveraging the more comprehensive information from both bird’s eye view (BEV) and range view (RV). These multi-view methods either refine the proposals predicted from single view via fused features, or fuse the features without considering the global spatial context; their