BabelCalib: A Universal Approach to Calibrating Central Cameras
Description
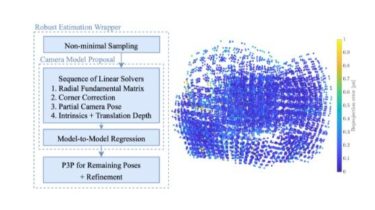
BabelCalib is a calibration framework that can estimate camera models for all types of central projection cameras. Calibration is robust and fully automatic. BabelCalib provides models for pinhole cameras with additive distortion as well as omni-directional cameras and catadioptric rigs. The supported camera models are listed under the solvers directory. BabelCalib supports calibration targets made of a collection of calibration boards, i.e., multiple planar targets. The method is agnostic to the pattern type on the calibration boards. It is robust to inaccurately localized corners, outlying detections and occluded targets.
Installation
You need to clone the repository. The required library Visual Geometry Toolkit is added as a submodule. Please clone the repository with submodules: